Energooszczędny skok kinematyka oparta na naturalnym modelu
Odzyskiwanie, magazynowanie i uwalnianie energii w oparciu o naturalny model

Na Herbie Australii oznacza postęp, natomiast jego szczególny sposób poruszania się jest wyjątkowy w świecie zwierząt: kangur. Dzięki swoim niezwykle długim tylnym nogom torbacz ten może poruszać się szybko i skutecznie po terenie. Mechanizm skoku umożliwia kangurowi zwiększenie prędkości bez jednoczesnego zwiększania zużycia energii. Z każdym odbiciem może magazynować energię z fazy lądowania i używać jej ponownie do następnego skoku. Ścięgna Achillesa pełnią tu ważną rolę, dlatego też są szczególnie wyraźne u żywego kangura.
Nowe perspektywy dzięki bionice
Zespół programistów z Festo Bionic Learning Network spędził dwa lata odtwarzając działanie naturalnego skoku kangura jak najściślej i uczenia się z niego. Jako lider innowacji w zakresie technologii automatyzacji, Festo zawsze poszukuje nowych lub jeszcze nie rozpowszechnionych wzorców ruchowych i koncepcji napędu. Źródłem nowej wiedzy i technologii przyszłości jest natura.
Realizacja techniczna unikalnego wzorca ruchu
Podobnie jak jego żywy odpowiednik Bioniczny Kangur może odzyskać, przechowywać i wydajnie pobierać energię do następnego skoku. Techniczna realizacja wymaga zarówno zaawansowanej technologii sterowania jak i stabilnej kinematyki skoku. Spójna lekka konstrukcja i inteligentne połączenie napędów pneumatycznych i elektrycznych umożliwiają unikalne zachowanie skoków. System jest sterowany za pomocą gestów.
Wbudowany mobilny system zasilania
Festo zwróciło szczególną uwagę na mobilny system zasilania dla sztucznego kangura, i nawet opracowano w tym celu dwie różne koncepcje. Mała sprężarka lub urządzenie magazynujące sprężone powietrze może być umieszczone wewnątrz obudowy. Obydwa dostarczają sprężone powietrze niezbędne podczas skoków, które dozuje się dokładnie poprzez dwa zawory elektromagnetyczne Festo MHE2. Akumulatory litowo-polimerowe działają jako urządzenia do magazynowania energii elektrycznej. Zasilają one oba zawory i napędy elektryczne, a także zintegrowany system kontroli Festo CECC, w niezbędną energię.
|
|
|


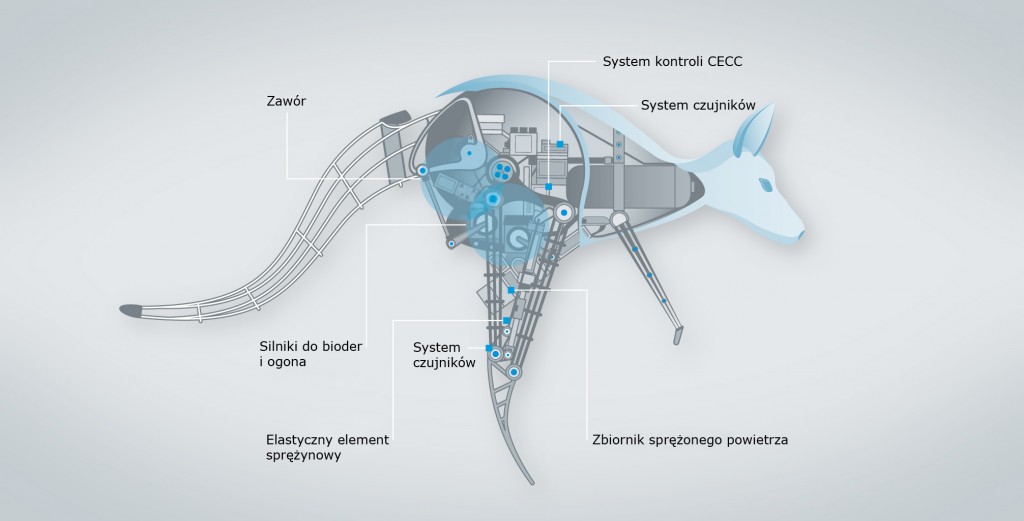 Bardzo złożony system całościowy: sprytne połączenie technologii napędów, sterowania i mobilnego zasilania energetycznego
Bardzo złożony system całościowy: sprytne połączenie technologii napędów, sterowania i mobilnego zasilania energetycznego
Intuicyjna koncepcja obsługi za pomocą systemu sterowania gestem
Bioniczny kangur może być sterowany gestami za pomocą specjalnej opaski. Opaska wykrywa ruchy mięśni operatora. Czujnik położenia w opasce rejestruje ruch ramienia. Opaska wysyła te sygnały za pomocą Bluetooth do kompaktowego systemu sterowania bionicznego kangura, wskutek czego zaczyna on interakcje z operatorem.
Napędy elektryczne do ruchów precyzyjnych
Stojąc, kangur dotyka podłogi z obiema nogami i ogonem, co daje mu stabilne trzypunktowy kontakt. Jego ogon jest również niezbędną równowagę podczas skoków. Elektryczny serwomotor swoiście steruje jego kątem natarcia i zapewnia odpowiedni ruch wyrównawczy. Kangur w ten sposób kompensuje przeciwną tendencję swoich nóg, które muszą być wyprowadzone do przodu w fazie lądowania. Nogi są również kontrolowane przez dwa siłowniki elektryczne, które znajdują się między biodrem a udem, tak aby można je przesunąć do przodu i do tyłu. Wszystkie sygnały sterujące są wytwarzane przez zwarty system sterowania.
Siłowniki pneumatyczne dla zachowania dynamiki skoków
DSNUP 20 lekki pneumatyczny cylinder Festo jest przymocowany wzdłuż każdej dolnej kończyny, uaktywnia nogi. Kolana i kostki są połączone poprzez tak zwane dodatnie urządzenie kinematyczne, co daje w rezultacie połączoną sekwencje ruchu. Funkcja naturalnego ścięgna Achillesa została przyjęta przez elastyczny element sprężysty wykonany z gumy. Jest on przymocowany na końcu stopy i równolegle do cylindra pneumatycznego w stawie kolanowym. Sztuczne ścięgno amortyzuje skok, jednocześnie absorbuje energię kinetyczną i uwalnia ją do następnego skoku.
Zintegrowane sterowanie i diagnostyka w czasie rzeczywistym
Monitorowania stanu oraz precyzyjna technologia kontroli, zapewnia wymaganą stabilność podczas skoków i lądowania. Stan energetyczny kangura, manipulowane zmienne i kąt natarcia są stale monitorowane i oceniane. W tym samym czasie, układ kontroli przetwarza wartości wielu czujników. Składają się one na złożone algorytmy sterowania, dające w rezultacie manipulowane zmienne służące do uruchamiania cylindrów i silników.
|
|
|
 Prosta obsługa: sterowanie gestem za pomocą opaski
Prosta obsługa: sterowanie gestem za pomocą opaski Układ optymalny: integracja funkcji na małej przestrzeni
Układ optymalny: integracja funkcji na małej przestrzeni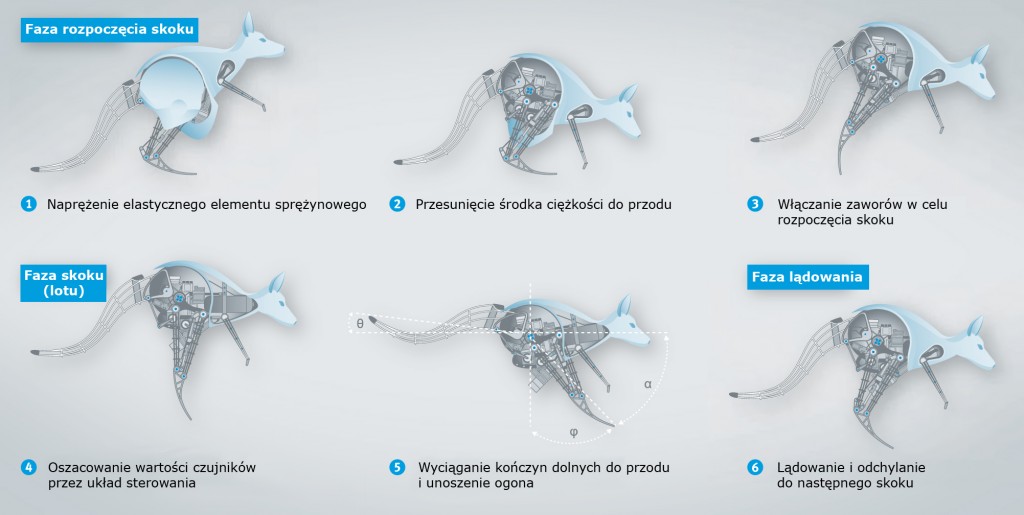 Unikalne zachowanie skoku: inteligentne połączenie zainstalowanych komponentów dla stabilnych i efektywnych skoków
Unikalne zachowanie skoku: inteligentne połączenie zainstalowanych komponentów dla stabilnych i efektywnych skoków
W celu przeniesienia tak małej masy jak to możliwe, wszystkie elementy są optymalnie rozmieszczone, powiązane i kontrolowane w możliwie jak najmniejszej przestrzeni. Elementy obudowy są wycięte z pianki. Części układ kinematycznego są wykonane ze spieku laserowego wzmocnionego węglem. W wyniku tego, sztuczne zwierzę waży tylko siedem kg przy wysokości około jednego metra i może wyskoczyć na wysokość 40 centymetrów i na odległość do 80 cm.
Fazy rozpoczęcia skoku i skoku (lotu)
Przed pierwszym skokiem, elastyczne ścięgno zostaje wstępnie pneumatycznie naprężone. Bioniczny Kangur przesuwa swój środek ciężkości do przodu i zaczyna się pochylać. Tak szybko, jak określony kąt zostanie osiągnięty przy odpowiedniej prędkości kątowej, cylindry pneumatyczne są aktywowane, energia ze ścięgna zostaje uwolniona i kangur rozpoczyna skok. Aby skoczyć jak najdalej, kangur wyciąga swoje kończyny dolne do przodu w fazie lotu. Stwarza to moment obrotowy w udzie, który bioniczny kangur niweluje ruchem ogona. Górna część ciała pozostaje niemal poziomo.
Faza lądowania: energia do następnego skoku
Po lądowaniu ścięgno zostaje ponownie naprężone w ten sposób przekształcając energię kinetyczną poprzedniego skoku na potencjalną energię. Energia jest tym samym przechowywana w systemie i może zostać wykorzystana do drugiego skoku. Faza lądowania to proces o zasadniczym znaczeniu dla odzyskiwania energii i jest odpowiedzialny za efektywne zachowania skoku kangura. Podczas tego etapu ogon przesuwa się w kierunku podłoża, a tym samym z powrotem do swego położenia początkowego.
Mniejsze zużycie energii w kolejnych skokach
Jeśli kangur kontynuuje skoki, to przekazuje on przechowywaną energię bezpośrednio dla następnego skoku. Energia potencjalna z elastycznego cięgna jest ponownie wykorzystywana w tym momencie. Zawory przełączają się w odpowiednim momencie i rozpoczyna się następny skok. W ten sposób następuje kilka skoków jeden po drugim. Jeśli Bioniczny Kangur ma zatrzymać się, musi wchłonąć tyle energii, ile to możliwe. Aby to zrobić, siłowniki pneumatyczne są odpowiednio uruchomione i sztuczne ścięgna zostają ponownie napięte.
|
|
|
|
Holistyczne podejście: zespół spędził dwa lata na realizację techniczną – zaczynając od właściwego doboru materiałów … |
|
 Dynamiczny start: duża moc skoków dzięki napędom pneumatycznym
Dynamiczny start: duża moc skoków dzięki napędom pneumatycznym Wydajne lądowania: przechowywanie energii dla następnego skoku
Wydajne lądowania: przechowywanie energii dla następnego skoku
Bodziec dla produkcji przyszłości
Oprócz technicznego wdrożenia unikalnej kinematyki skoków, kangur pokazuje kilka aspektów zintegrowanej automatyzacji na raz: system łączy własne elementy na niewielkiej przestrzeni. Liczne funkcje są koordynowane za pomocą wysoce skomplikowanego technologicznie systemu sterowania. Dla Festo, zasada stałej diagnostyki jest gwarancją bezpieczeństwa pracy i stabilności procesu – zarówno dla obiektów bionicznych jak i w warunkach przemysłowych. Inne interesujące podejście do automatyki przyszłości to pojęcie odzyskiwania, magazynowania i wydajnego ponownego wykorzystania potencjalnej energii, jak również system dostarczania energii dzięki pneumatyce mobilnej.
Odzyskiwanie energii w sektorze automatyki
W automatyce przemysłowej, wiedza na temat odzyskiwania i składowania energii odgrywa ważną rolę – na przykład, jeśli chodzi o odzyskiwanie ciepła ze sprężarek lub przekazywanie energii elektrycznej z powrotem do sieci.
Inteligentne połączenie pneumatyki i elektryki
Przykład sztucznego kangura Festo pokazuje również, jak pneumatyczne i elektryczne technologie napędów połączono w układzie o wysokiej dynamice. Kangur osiąga dużą moc skoków przy pomocy pneumatyki. Siłowniki pneumatyczne są zazwyczaj potężne i bardzo dynamiczne. Są one stosunkowo lekkie i elastyczne, co oznacza, że działają również jako amortyzatory podczas lądowania. W miejscach, w których wymagana jest najwyższa dokładność pozycjonowania, stosowane są silniki elektryczne – na przykład wtedy, gdy chodzi o sterowanie ogonem i biodrem.
Skuteczne rozwiązania z trafnego wyboru
W codziennych sytuacjach przemysłu odpowiednia aplikacja określa również, czy najlepsze rozwiązanie oparte jest na pneumatycznych lub elektrycznych napędach czy też może obu. Jako specjalista w obu technologiach, Festo oferuje swoim klientom indywidualne rozwiązania i wspiera ich kompleksową obsługę oraz odpowiednie narzędzia symulacyjne.
|
|
|
 … oraz programowanie bardzo złożonych algorytmów sterowania …
… oraz programowanie bardzo złożonych algorytmów sterowania … … aż po odcięcie przewodu dzięki zaopatrzeniu w energię mobilną
… aż po odcięcie przewodu dzięki zaopatrzeniu w energię mobilną
Dane techniczne:
- Wysokość: 100 cm w pozycji pionowej
- Wysokość w pozycji siedzącej: 60 cm
- Waga: 7 kg
- Odległość skoku: do 80 cm
- Wysokość skoku do 40 cm
- 1 układ sterowania Festo CECC z interfejsami Ethernet, CAN, RS232, RS485, cyfrowe IO oraz łącza IO
- 3 harmoniczne silniki napędowe
- 2 standardowe cylindry Festo DSNUP 20
- 2 szybko działające zawory Festo MHE2-MS1H-5/2-M7
- 1 Zestaw sensorów Xsens (AHRS)
- 1 przetwornik ciśnienia Festo SPTE-P10R-Q4-V-2.5K
- 1 potencjometr obrotowy METALLUX Hall
- Ciśnienie zasilania: 8 bar
- Powłoka obudowy: pianka
- Kinematyka: części spiek laserowy ze wzmocnieniem węglowym
- Koncepcja pracy: Kontrola gestem przy użyciu opaski Myo stworzona przez Thalmic Labs Inc z czujnikami aktywności mięśni EMG oraz zintegrowanym czujnikiem położenia
- Zasięg: 50 m Bluetooth
Uczestnicy projektu
Inicjator projektu:
- Dr Wilfried Stoll, partner zarządzający, Festo Holding GmbH
Zarządzanie projektem:
- Dr Heinrich Frontzek, Elias Knubben, Festo AG & Co. KG
Zespół projektowy:
- Johannes Stoll, Nadine Kärcher, Daniel Bauer, Daniel Strohhäcker, Xander Gerrmann, Merlin Morlock, Mart Moerdijk, Teresa Martin, Festo AG & Co. KG
Technologia sterowania:
- Dr Alexander Hildebrandt, Martin Ehrle, Marius Müller, Festo AG & Co. KG;
- Professor Knut Graichen, Sebastian Hentzelt, Instytut pomiarów, sterowania oraz mikro technologii Uniwersytetu w Ulm
Wsparcie naukowe:
- Dr Nina Gaißert, Festo AG & Co. KG
Źródło: Festo AG & Co. KG